10.1. Préparation

Branchez votre servomoteur sur le connecteur SERVO. Utilisez le connecteur P13 pour le servomoteur.
Vous devez connecter votre batterie sur le connecteur POWER pour alimenter votre servomoteur.
★ Le câble USB ne fournit pas assez de puissance pour faire fonctionner vos moteurs.
L’angle par défaut des servomoteurs est de 90 degrés avec une échelle qui s’étend de 0 à 180 degrés de la gauche vers la droite.
Les sens de rotation sont gravés dans chaque moteur.
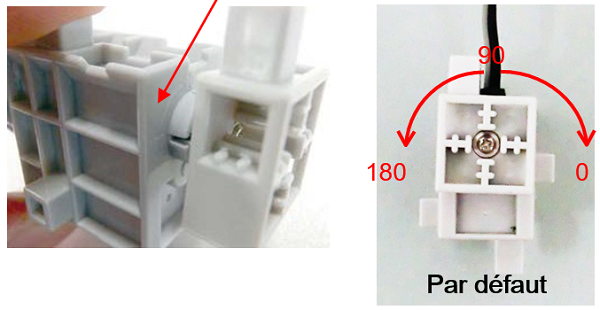
Essayez de tourner l’arbre de transmission vers la gauche ou la droite. Si les angles sont trop loin de la position par défaut, cela signifie que le bloc de l’arbre de transmission a glissé.
Pour éviter d’endommager ses engrenages internes, le bloc du servomoteur a été conçu pour glisser ou tourner librement chaque fois qu’une trop grande tension est exercée sur l’arbre de transmission. Tournez cette partie à la main dans le sens inverse jusqu’à ce que l’arbre de transmission s’enclenche dans la bonne position.
★ Ne faites pas glisser votre servomoteur à dessein. Cela peut l’endommager.
10.2. Programmer
① Créer le programme
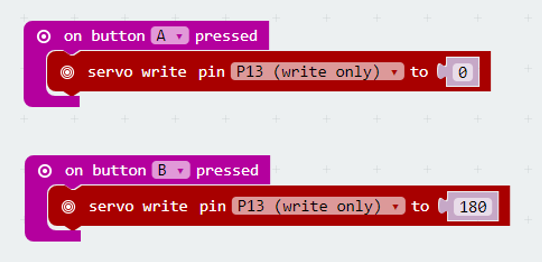
Un programme qui fait tourner votre servomoteur à 0 degré lorsqu’on appuie sur A et à 180 degrés lorsqu’on appuie sur B ressemblerait à celui ci-dessous.
③ Transférer et tester le programme
Téléchargez votre programme et transférez-le sur le micro:bit (cf. section 3.2. pour savoir comment transférer un programme). En appuyant sur A, votre servomoteur tournera à 0 degré. En appuyant sur B, il tournera à 180 degrés.
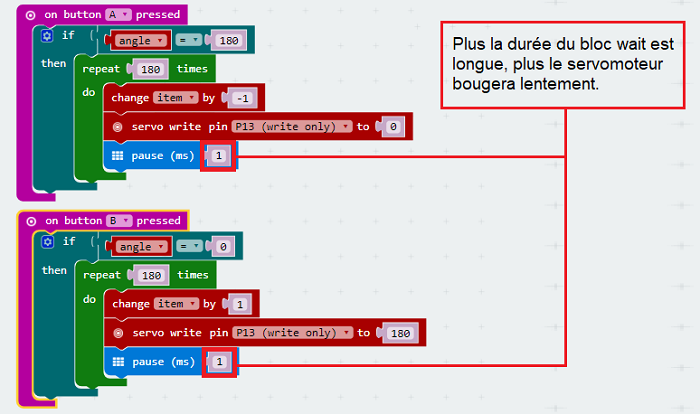
Si vous souhaitez que votre servomoteur tourne plus lentement, utilisez une variable pour paramétrer ses angles et programmez-le pour changer ses angles d’1 degré sur un temps fixé. Jetez un coup d’oeil sur le programme ci-dessous.